
Depuis le début des années quatre-vingt, de nombreux systèmes électroniques ont fait leur apparition dans le domaine de l'automobile, selon trois grandes étapes
successives :
✔ l'époque où chaque système était totalement
indépendant des autres ;
✔ la seconde période, pendant laquelle quelques
systèmes commençaient à communiquer entre
eux ;
✔ enfin, la dernière époque où tout le monde doit
communiquer avec tout le monde, et ce en
temps réel.
Début 1981, quelques grandes sociétés automobiless'intéressèrent à des systèmes de communication fonctionnant en temps réel entre différents microcontrôleurs,concernant notamment le contrôle moteur, latransmission automatique et l'anti-patinage.
En 1983, le leader allemand d'équipements automobileRobert Bosch Gmbh pris la décision de développer un protocole de communication orienté vers des systèmes distribués fonctionnant en temps réel et satisfaisant àtoutes ses propres exigences.
En 1985, le géant américain Intel, puis Philips et Siemensse lancent dans la fabrication de circuits intégrés.
Depuis, d'autres fabricants leur ont emboîté le pas(Motorola, National Semiconductors, Texas Instruments,MHS, etc.)
Au printemps 1986, la première communication concernant le bus CAN fût réalisée.
Enfin, au milieu de l'année 1987, la réalité prit la forme des premiers siliciums fonctionnels ; puis, en 1991, une première voiture (allemande) haut de gamme équipée
de cinq Electronic Central Units (ECU) et d'un bus CAN fonctionnant à 500 kb/s sortit des chaînes de production.
Ce fut alors l'arrivée de nombreux bus de même type, soit aux USA, soit au japon, soit en France (bus VAN -supporté par un GIE composé principalement de PSA
et Renault).
À partir de 1994, le constructeur Citroën commercialise des véhicules multiplexés (XM) comportant 24 noeuds et mettant en oeuvre le protocole VAN
Date importantes
1980 Naissance du CAN (Robert Bosch Gmbh).
1985 Naissance du VAN.
1986 Sortie de la BMW 850 CSI (le réseaumultiplexé permet aux deux calculateursdes deux moteurs 6 cylindres en ligne reliésmécaniquement de communiquer).
1989 Mercedes ( apparition du multiplexage sur
la SL 500).
1991 CAN Low Speed devient norme ISO 1519-2
standard.
1992 Mercedes utilise le multiplexage CAN sur
une classe S.
1993 CAN High Speed devient norme ISO 11898
(CAN 2.0).
1994 Fabrication en série limitée véhicules
(Citroën XM), l'Audi A4 sort avec la gestion
moteur multiplexée.
1995 C'est le tour du Ford Galaxy d'avoir un
réseau.
1997 Sur la Volkswagen Passat, le confort duvéhicule est multiplexé.
1998 Fabrication en série sur la Peugeot 206.
1999 Fabrication en série sur la Peugeot 406 et la Citroën Xsara Picasso.
2001 Sortie de la Renault Laguna II avec unréseau multiplexé véhicule qui relie douze
calculateurs, deux réseaux privatifs (un pourle contrôle de trajectoire, un autre pour lafonction lève-vitre impulsionnel avec siègemémorisé), un réseau multimédia.
Intérêt du multiplexage
Les normes antipollution, la sécurité ainsi que leconfort des utilisateurs entraînent une augmentation constante des fonctions électroniques présentes dans nos véhicules : climatisation, navigation, ABS,
radar, EOBD1…
Ainsi que bon nombre d’informations qui peuvent être utilisées par les systèmes.
l'objectif est de simplifier, de réduire le nombre de câble et de connecteurs afin d'augmenter le nombbre fonctions ainsi que leur rapidité
Protocoles.
Divers protocoles sont utilisé,le plus connu est le CAN. Il en équipe la plus part des véhicule produit.
Le protocole VAN n'est plus utilisé.
le protocole LIN utilisé pour des fonctions annexes car le débit est très faible.
Le protocole MOST utilisé pour les réseaux multimédia.
Le Bytflight utilisé dans le passé pour les fonctions d'airbag.
Le Flex ray utilisé pour les systèmes moteur et châssis
CAN
Il sont constitué de deux cables torsadés. Il y'a deux cable qui donnent la même informations mais avec des signaux inversés.
Cela sert à avoir une informations redondante. et donc de sécuriser le signal.
le bus utilisé en format CAN est
constitué de deuxfils désignés par CAN-H (High : haut) et CAN-L (Low :
bas) ; les signaux sont complémentaires l’un de l’autre mais les niveaux
logiques « 0 » et « 1 » sont à des potentiels différents.
Les tensions sont comprises :
● 2,5 < CAN-H < 3,5 V ;
● 1,5 < CAN-L < 2,5 V.

Oscillogramme.
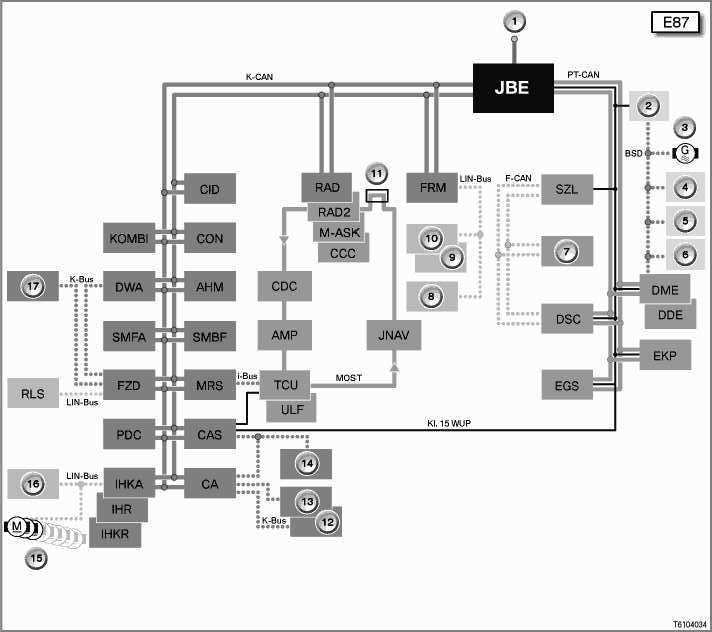
· 100 kbits/s : K-CAN
· 500 kbits/s : bus PT-CAN, F-CAN
Flex Ray.
A ce jours le bus filaire le plus rapide utilisé. Il sert pour les réseaux moteur et châssis.
Il est utilisé par très robuste mécanique contrairement au MOST.
Il est utilisé notamment pour équipé les amortisseurs ( suspension piloté ayant dans chaque amortisseur un " calculateur "
Le FlexRay offre une transmission des données très performantes en temps réel entre les composants électriques et mécatroniques du véhicule. Avec une vitesse de transmission des données de 10 Mbits/s, le FlexRay est nettement plus rapide que les bus de données actuellement utilisés en automobile dans le domaine de la carrosserie et de la transmission/châssis.
Avantages du FlexRay :
· Grande bande passante
- Vitesse de transmission des données 10 Mbits/s (comparativement au CAN : 0,5 Mbit/s)
- Temps de cycle court de 2,5 ms (comparativement au CAN : 10 ms)
- Structure de bus simple et claire possible ne (suppression des passerelles par exemple)
· Mode de fonctionnement inscriptible défini dans le temps (déterminisme)
- Transmission des messages en temps réel garantie (comparativement au CAN : incompatible temps réel)
- Synchronisation des boîtiers électroniques
Most et Byteflight .
Ce sont deux réseaux utilisant la fibre optique. A ce jours ce sont les protocole les plus rapide utilisés.
MOST
Il servent pour de bus de multimédia ( GPS, son ......)
Le bus est constitué en forme de boucle.
Byteflight
Il est constitué en étoile mais à ce jours il n'est plus utilisé.
Architecture multiplexage chez BMW.
Série 1
2002 Des véhicules commel'Audi A8 ou la Mercedes Classe E sont totalementmultiplexés. Leurs réseaux reliententre eux une trentaine de calculateurs

